Worauf ist bei der Bewertung der Sicherheit von Cobots zu achten?
Zur Verfügung gestellt von Nordamerikanische Fachredakteure von DigiKey
2024-04-03
Kollaborative Roboter (Cobots) sollen mit dem Menschen zusammenarbeiten und die flexible Produktion in Industrie-4.0-Fabriken unterstützen. Im Vergleich zu herkömmlichen Industrierobotern sind Cobots einfacher, leichter einzurichten und benötigen keine sicher isolierten Arbeitsbereiche. Da sie für die Zusammenarbeit mit Menschen konzipiert sind, unterscheiden sich Cobots von anderen Industrierobotern durch Merkmale wie Kollisionserkennungssysteme, Kraftrückkopplung, elastische Aktuatoren und trägheitsarme Servomotoren.
Da sie von ihrer Konzeption her anders sind, wurden für Cobots spezielle Sicherheitsstandards entwickelt. Die technische Spezifikation der Internationalen Organisation für Normung (ISO/TS) 15066 legt die Sicherheitsanforderungen für industrielle Cobots und ihre Arbeitsumgebung fest. Sie ergänzt die Anforderungen und Hinweise zum Betrieb von Robotern in ISO 10218-1 und ISO 10218-2.
Dieser Artikel gibt einen kurzen Überblick über die Anforderungen der ISO/TS 15066 und deren Übereinstimmung mit ISO 10218-1 und 10218-2. Anschließend wird die Komplexität der Zusammenarbeit erörtert, einschließlich der Frage, wie der kollaborative Arbeitsbereich definiert wird. Es werden Faktoren im Zusammenhang mit der Robotersicherheit untersucht, wie z. B. in Cobots eingebaute Sicherheitsfunktionen und welche externen Sicherheitsfunktionen erforderlich sind, zusammen mit beispielhaften Geräten wie Näherungssensoren, Lichtvorhängen und Sicherheitskontaktmatten. Abschließend wird ein kurzer Überblick über einige Anwendungen gegeben, bei denen die Sicherheit von Robotern eine besondere Rolle spielt.
Es gibt mehrere wichtige Sicherheitsstandards für Industrieroboter und Cobots. ISO/TS 15066 enthält detaillierte Sicherheitsanforderungen für industrielle Robotersysteme und die Arbeitsumgebung und wurde geschrieben, um auf den begrenzten Anforderungen früherer Normen wie der ISO 10218-Serie aufzubauen und diese zu ergänzen. ISO 10218-1 befasst sich mit allgemeinen Robotern und Robotergeräten, während ISO 10218-2 sich auf Robotersysteme und deren Integration konzentriert. American National Standards Institute/Robotics Industry Association (ANSI/RIA) R15.06 ist eine nationale Übernahme von ISO 10218-1 und ISO 10218-2.
Die Komplexität der Zusammenarbeit
Bevor wir uns mit den Details der Cobot-Sicherheit befassen, ist es hilfreich, den Begriff „Zusammenarbeit“ zu definieren. Die Zusammenarbeit in der Robotik ist komplex und umfasst drei Faktoren:
- Ein Cobot ist laut ANSI/RIA R15.06 ein „Roboter, der für die direkte Interaktion mit einem Menschen innerhalb eines definierten kollaborativen Arbeitsbereichs konzipiert ist“.
- Ein kollaborativer Betrieb ist laut ISO/TS 15066 ein „Zustand, in dem ein speziell entwickeltes Robotersystem und ein Bediener in einem kollaborativen Arbeitsbereich arbeiten“.
- Ein kollaborativer Arbeitsbereich schließlich ist der „Arbeitsbereich innerhalb des geschützten Raums, in dem der Roboter und ein Mensch während des Produktionsbetriebs gleichzeitig Aufgaben ausführen können“, so die ANSI/RIA R15.06.
Es kommt auf die Definition des kollaborativen Arbeitsbereichs „innerhalb des geschützten Raums“ an Der geschützte Raum enthält zusätzlich zu den Standard-Sicherheitsfunktionen des Roboters eine weitere Schutzschicht.
Zu den üblichen Schutzfunktionen, die in Cobots integriert sind, gehören Kontakterkennungssysteme, die auf Drehmomentmessungen an jedem Gelenk basieren und unerwartete Stöße, Hindernisse oder übermäßige Kräfte oder Drehmomente überwachen. Außerdem sollten automatische Bremssysteme und manuelle Bremsentriegelungen für die Bewegung des Arms ohne Strom vorhanden sein.
Ein unerwarteter Kontakt des Roboters mit einer Person ist ein besonderes Problem. Die Normen schreiben vor, dass Berührungen an allen Stellen des Kopfes vermieden werden müssen. Darüber hinaus unterteilt die Norm den Körper in 29 spezifische Bereiche und nennt Einschränkungen für zwei Arten von Kontakten:
- Ein transienter (kurzzeitiger) Kontakt ist ein sich bewegendes, dynamisches Ereignis, bei dem der Cobot eine Person berührt. Die Beschränkungen basieren auf dem Ort, der Trägheit und der relativen Geschwindigkeit.
- Ein quasistatischer Kontakt entsteht, wenn ein Körperteil zwischen dem Roboter und einer Oberfläche eingeklemmt ist. Die Begrenzungen beruhen auf Druck und Kraft im Zusammenhang mit Quetsch- und Klemmwirkungen.
Die Spezifikation bietet eine Orientierungshilfe, keine absoluten Grenzwerte, basierend auf Anwendungserwägungen. Der Leitfaden ist informativ und spiegelt die derzeit besten Praktiken wider, da die Zusammenarbeit zwischen Menschen und Robotern ein neues Gebiet ist und die Forschung noch nicht abgeschlossen ist.
Kontinuum der Zusammenarbeit
Es gibt keine einzige kollaborative Anwendung. Menschen und Cobots können in vielfältiger Weise interagieren und zusammenarbeiten. Kollaborative Anwendungen reichen von der Koexistenz, bei der ein Roboter unter Strom steht, wenn eine Person den kollaborativen Arbeitsbereich betritt, bis hin zu einer interaktiven Aktivität, bei der die Person den Roboter während des Betriebs berührt (Abbildung 1).
 Abbildung 1: Die Zusammenarbeit von Menschen und Robotern umfasst ein breites Spektrum an möglichen Interaktionsebenen. (Bildquelle: SICK)
Abbildung 1: Die Zusammenarbeit von Menschen und Robotern umfasst ein breites Spektrum an möglichen Interaktionsebenen. (Bildquelle: SICK)
Eine Risikobewertung ist erforderlich, um die Sicherheitsanforderungen der einzelnen kollaborativen Anwendungen zu ermitteln. Sie umfasst die Identifizierung, Bewertung und Verringerung der mit der Anwendung verbundenen Gefahren und Risiken. ISO 10218 enthält eine Liste von Sicherheitsmerkmalen, die unter verschiedenen Umständen angemessen sein können, aber keine endgültigen Anforderungen. Die ISO/TS 15066 enthält zusätzliche Details zur Risikobewertung von Robotern. In jedem Fall besteht das Ziel der Risikobewertung darin, externe Sicherheitsvorrichtungen und -systeme zu ermitteln, die für die sichere Durchführung von kollaborativen Anwendungen erforderlich sind.
Einen tieferen Einblick in die Risikobewertung und Roboter finden Sie in dem Artikel „Sichere und effiziente Integration von AMRs in den Industrie-4.0-Betrieb für maximalen Nutzen“.
Schutz und Effizienz
Cobots sind zwar für einen sicheren Betrieb ausgelegt, aber zusätzliche Schutzschichten können die Effizienz von kollaborativen Anwendungen verbessern. Wenn eine Person ohne zusätzliche Sicherheitsvorkehrungen den kollaborativen Arbeitsbereich betritt, schreibt die ISO/TS 15066 eine Höchstgeschwindigkeit von 0,25 Metern pro Sekunde (m/s) pro Achse vor. Für die meisten Cobots ist das sehr langsam.
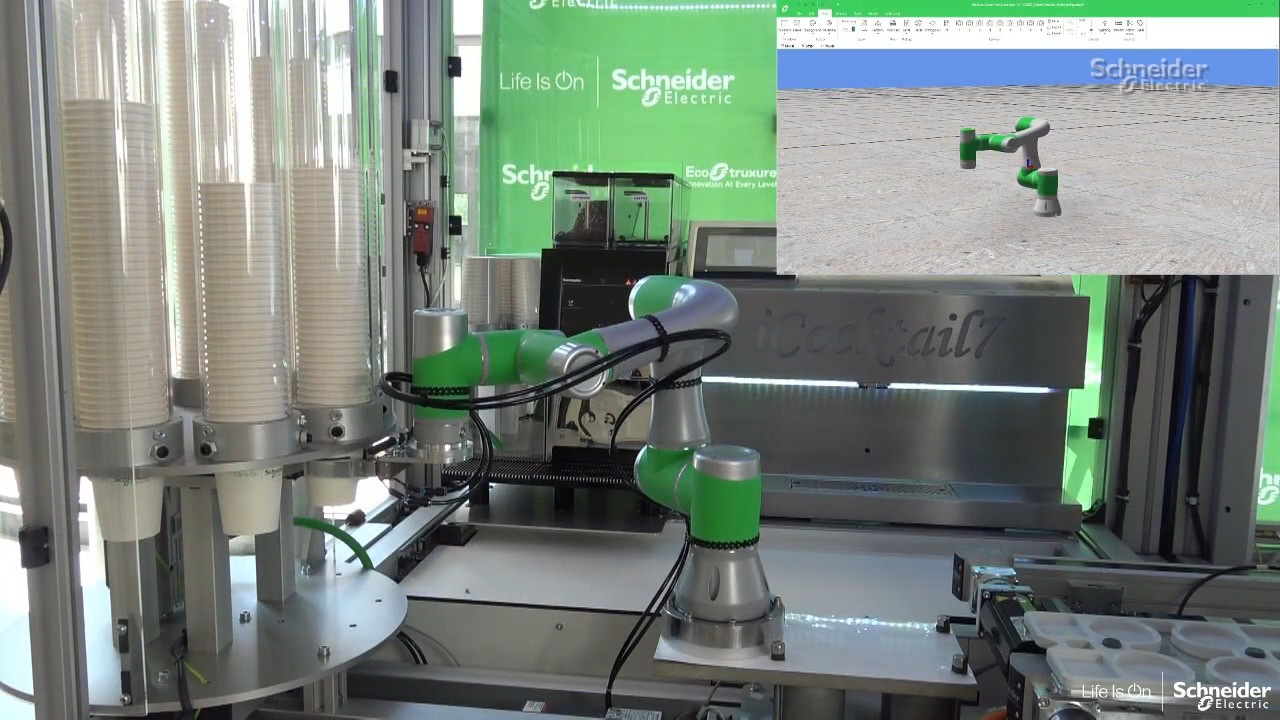
Der Lexium-Cobot LXMRL12S0000 von Schneider Electric beispielsweise hat eine maximale Nutzlast von 12 Kilogramm (kg), einen Arbeitsradius (Arbeitsbereich) von 1327 Millimetern (mm), eine Positioniergenauigkeit von ±0,03 mm und eine maximale Geschwindigkeit des Werkzeugendes von 3 Metern pro Sekunde (m/s), also 12-mal schneller als die nach ISO/TS 15066 zulässige Höchstgeschwindigkeit, wenn sich eine Person im kollaborativen Arbeitsbereich befindet (Abbildung 2).
 Abbildung 2: Dieser Cobot kann sich 12-mal schneller bewegen als die nach ISO/TS 15066 zulässige Höchstgeschwindigkeit, wenn sich eine Person im kollaborativen Arbeitsbereich befindet. (Bildquelle: Schneider Electric)
Abbildung 2: Dieser Cobot kann sich 12-mal schneller bewegen als die nach ISO/TS 15066 zulässige Höchstgeschwindigkeit, wenn sich eine Person im kollaborativen Arbeitsbereich befindet. (Bildquelle: Schneider Electric)
Bei vielen Anwendungen kann der Cobot über einen längeren Zeitraum allein betrieben werden. Die Erkennung der An- oder Abwesenheit von Personen im kollaborativen Arbeitsbereich kann also einen viel schnelleren Betrieb und eine höhere Effizienz ermöglichen, wenn niemand anwesend ist. Gängige Geräte zur Erkennung der Anwesenheit von Personen sind Sicherheitsscanner, Lichtvorhänge und Sicherheitskontaktmatten. Jede Technologie bietet eine Reihe von Vorteilen, und sie werden oft in Kombination eingesetzt.
Sicherheitsscanner
Sicherheitsscanner überwachen einen bestimmten Bereich, um die Anwesenheit von Personen zu erkennen. Sie können feststellen, wie weit eine Person entfernt ist, und zusätzlich zum aktiven Sicherheitsbereich verschiedene Warnbereiche einrichten.
Das Modell OS32C-SP1-4M von Omron ist ein gutes Beispiel für einen Sicherheitslaserscanner, der für den Einsatz mit Cobots konzipiert wurde. Es bietet einen Sicherheitsradius von bis zu 4 Metern (m) und kann mehrere Warnzonen bis zu 15 m unterstützen. Es umfasst 70 Standardsätze von Sicherheits- und Warnbereichskombinationen zur Unterstützung komplizierter kollaborativer Arbeitsumgebungen. Darüber hinaus kann die minimale Objektauflösung auf 30, 40, 50 oder 70 mm eingestellt werden, und die Reaktionszeit kann von 80 Millisekunden (ms) bis zu 680 ms reichen, was die Anwendungsflexibilität weiter erhöht (Abbildung 3).
 Abbildung 3: Dieser Sicherheitsscanner bietet einen Sicherheitsradius von bis zu 4 m und kann mehrere Warnbereiche von bis zu 15 m unterstützen. (Bildquelle: DigiKey)
Abbildung 3: Dieser Sicherheitsscanner bietet einen Sicherheitsradius von bis zu 4 m und kann mehrere Warnbereiche von bis zu 15 m unterstützen. (Bildquelle: DigiKey)
Lichtvorhänge
Lichtvorhänge können die Anwesenheit von Personen erkennen und so konstruiert werden, dass sie Objekte unterschiedlicher Größe, wie Finger oder Hände, erkennen. Im Gegensatz zu Sicherheitsscannern messen Lichtvorhänge nicht die Entfernung. Sie senden eine Reihe von Lichtstrahlen zwischen linearen Sender- und Empfängeranordnungen und können erkennen, wenn ein Objekt einen oder mehrere Strahlen unterbricht.
Was die Sicherheitseinstufung betrifft, so gibt es zwei Hauptklassifizierungen von Lichtvorhängen: Typ 2 und Typ 4. Sie haben ein ähnliches Erscheinungsbild, sind aber für unterschiedliche Sicherheitsniveaus ausgelegt. Typ 4 überwacht den geschützten Raum, der einen kollaborativen Arbeitsbereich definiert. Lichtvorhänge vom Typ 2 sind für Anwendungen mit geringerem Risiko konzipiert.
Die Lichtvorhänge überwachen bestimmte Perimeter und sind mit verschiedenen Auflösungsstufen erhältlich, z. B. 14 Millimeter (mm) für die Fingererkennung und 24 mm für die Handerkennung. Das Modell SLC4P24-160P44 von Banner Engineering ist ein Kit mit Typ-4-Lichtvorhang mit einem Sender- und Empfänger-Array und hat eine Auflösung von 24 mm zum Schutz von Menschen und Maschinen wie Cobots (Abbildung 4). Die Emitter bestehen aus einer Reihe synchronisierter modulierter Infrarot-Leuchtdioden. Die Empfänger verfügen über eine entsprechende Reihe von synchronisierten Fotodetektoren. Die Strahler haben eine Reichweite von 2 Metern, und die Lichtvorhänge können über Längen von 160 bis 320 mm in 80-mm-Schritten installiert werden.
 Abbildung 4: Dieser Lichtvorhang vom Typ 4 hat eine Auflösung von 24 mm. (Bildquelle: Banner Engineering)
Abbildung 4: Dieser Lichtvorhang vom Typ 4 hat eine Auflösung von 24 mm. (Bildquelle: Banner Engineering)
Sicherheits-Laserscanner und -Lichtvorhänge bieten berührungslose Mittel zur Verbesserung der Sicherheit von kollaborativen Arbeitsbereichen. Sie können jedoch in optisch schwierigen Umgebungen, wie z. B. in Bereichen mit stark reflektierenden Oberflächen, die unerwünschte Lichtinterferenzen verursachen können, schwierig zu verwenden sein und sie können aufgrund von auslaufendem Öl oder Fett oder übermäßigem Staub oder Feuchtigkeit ausfallen.
Einige dieser optischen Sensoren verfügen über Empfindlichkeitseinstellungen, die dazu beitragen können, bestimmte Arten von Interferenzen abzuschwächen. Diese Empfindlichkeitseinstellungen können auch zu längeren Reaktionszeiten und anderen Leistungseinbußen führen. Eine andere Lösung ist die Verwendung einer Sicherheitskontaktmatte in Verbindung mit optischen Sensoren.
Sicherheitskontaktmatten
Sicherheitskontaktmatten haben zwei leitende Platten, die durch eine gerasterte Isolierschicht getrennt sind, und können allein oder in Kombination mit anderen Sensortypen verwendet werden. Wenn eine Person auf die Matte tritt, wird die obere leitende Platte eingedrückt und berührt die untere Platte, wodurch ein Alarmsignal ausgelöst wird (Abbildung 5). Die Außenseite der Matten besteht aus rutschfestem Polyurethan und ist wasser-, schmutz- und ölabweisend. Mit der SENTIR-Matte Modell 1602-5533 von ASO Safety Solutions können bis zu 10 Matten in Reihe an eine einzige Überwachungseinheit angeschlossen werden, so dass eine maximale Abdeckung von 10 m2 erreicht wird.
 Abbildung 5: Beim Betreten berühren sich die obere und die untere leitende Schicht der Sicherheitsmatte und lösen ein Alarmsignal aus. (Bildquelle: ASO Safety Solutions)
Abbildung 5: Beim Betreten berühren sich die obere und die untere leitende Schicht der Sicherheitsmatte und lösen ein Alarmsignal aus. (Bildquelle: ASO Safety Solutions)
Sicherheit steckt im Detail
Es gibt keine einheitliche Formel, die Sicherheit garantiert. Jede kollaborative Anwendung ist anders und muss auf der Grundlage ihrer einzigartigen Merkmale und Bedürfnisse behandelt werden. Ein Schlüsselfaktor ist: Wo befindet sich die Anwendung auf dem Kontinuum der Zusammenarbeit (siehe Abbildung 1)? Je enger die Interaktion zwischen dem Cobot und dem Menschen ist, desto mehr Schutzmaßnahmen sind erforderlich.
Es gibt noch mehr Details zu beachten. Einige von ihnen sind:
- Jeder Standort muss einer detaillierten Risikobewertung unterzogen werden, um festzustellen, ob der Cobot von einem Arbeitsplatz zum anderen gebracht wurde. Auch wenn sie scheinbar gleich sind, können kleine Abweichungen einen Unterschied in der Sicherheit ausmachen.
- Wenn sich andere Maschinen im kollaborativen Arbeitsbereich befinden, müssen sie dann mit dem Abschaltsystem oder der Sicherheitsabschaltung für den Cobot verbunden werden?
- Dieser Artikel hat sich auf sicherheitsrelevante Hardware konzentriert, aber bei vernetzten Systemen, die immer häufiger vorkommen, ist die Cybersicherheit ein wichtiger Aspekt, um Störungen des Roboterbetriebs oder der Sicherheitssysteme zu verhindern.
Fazit
Die Cobot-Sicherheit ist ein komplexes Thema. Es beginnt mit der Definition des kollaborativen Arbeitsbereichs innerhalb des geschützten Raums und erfordert eine Risikobewertung des kollaborativen Betriebs. Normen wie ISO/TS 15066 und die Reihe ISO 10218 sind wichtig und bieten Empfehlungen und Leitlinien. Cobots verfügen über grundlegende Sicherheitsfunktionen wie Kollisionserkennungssysteme, Kraftrückkopplung, elastische Aktuatoren und trägheitsarme Servomotoren. Je nach den Besonderheiten der kollaborativen Anwendung können zusätzliche Sicherheitseinrichtungen wie Näherungssensoren, Lichtvorhänge und Sicherheitskontaktmatten erforderlich sein.
Haftungsausschluss: Die Meinungen, Überzeugungen und Standpunkte der verschiedenen Autoren und/oder Forumsteilnehmer dieser Website spiegeln nicht notwendigerweise die Meinungen, Überzeugungen und Standpunkte der DigiKey oder offiziellen Politik der DigiKey wider.