Prüfung der Technologieoptionen für Näherungs- und Abstandssensoren
Zur Verfügung gestellt von Nordamerikanische Fachredakteure von DigiKey
2024-09-18
Der Einsatz von Näherungs- und Abstandssensoren zur Erkennung der Anwesenheit und Position von Objekten ohne physischen Kontakt kann ein wichtiger Aspekt bei der Steuerung von industriellen Prozessen wie Materialhandhabung, Landmaschinen, Fertigungs- und Montagevorgängen sowie der Verpackung von Lebensmitteln, Getränken und Arzneimitteln sein.
Diese Sensoren sind mit einer Vielzahl von Technologien erhältlich, darunter Fotoelektrik, Laser, Induktion, Kapazität, Magnetismus und Ultraschall. Bei der Bestimmung der besten Wahl für eine bestimmte Anwendung müssen Faktoren wie Reichweite, Größe, Genauigkeit, Empfindlichkeit, Auflösung und Kosten berücksichtigt werden.
Ein Schlüsselfaktor bei vielen Anwendungen ist das Material des zu erfassenden Objekts. Einige Sensoren verhalten sich bei harten und faserigen Oberflächen unterschiedlich, und andere Sensoren können durch die Farbe oder das Reflexionsvermögen eines Objekts beeinflusst werden.
Dieser Artikel gibt einen Überblick über die gängigen Technologien für berührungslose Näherungssensoren, ihre Funktionsweise, ihre grundlegenden Leistungscharakteristiken und Beispielsensoren von SICK, inklusive einiger bestimmungsgemäßer Anwendungen.
Fotoelektrische Sensoren
Fotoelektrische Sensoren, wie die fotoelektrischen Näherungssensoren W10 von SICK, sind einfach zu bedienen und zu installieren und mit einer Vielzahl von Merkmalen erhältlich, die für zahlreiche Anwendungen geeignet sind. Dank ihrer robusten Konstruktion eignen sich die Sensoren W10 für die präzise Objekterkennung in schwierigen Umgebungen. Der integrierte Touchscreen beschleunigt die Parametereinstellung und den Einsatz der Sensoren (Abbildung 1).
 Abbildung 1: Der Touchscreen dieser fotoelektrischen Sensoren kann die Inbetriebnahme und den Einsatz beschleunigen. (Bildquelle: SICK)
Abbildung 1: Der Touchscreen dieser fotoelektrischen Sensoren kann die Inbetriebnahme und den Einsatz beschleunigen. (Bildquelle: SICK)
Die verfügbaren Anlernoptionen ermöglichen es, diese Sensoren an spezifische Anwendungsanforderungen anzupassen. Integrierte Funktionen wie Geschwindigkeitseinstellungen, Modi für Standard- und Präzisionsmessungen und die Ausblendung von Vorder- und Hintergrund bedeuten, dass ein einziger Sensor für eine Vielzahl von Anwendungen eingesetzt werden kann. Die Sensorreihe umfasst vier Varianten, die sich in ihren Betriebsabständen und Montageoptionen unterscheiden.
Hintergrundausblendung
Fotoelektrische Näherungssensoren mit Hintergrundausblendung (BGS) verwenden eine Triangulation zwischen dem sendenden und dem empfangenden Element. Signale von Objekten hinter dem eingestellten Erfassungsbereich werden ausgeblendet. Darüber hinaus ignoriert die BGS-Technologie von SICK stark reflektierende Objekte im Hintergrund und kann mit schwierigen Umgebungslichtbedingungen umgehen.
Die Hintergrundausblendung ist besonders nützlich, wenn das Zielobjekt und der Hintergrund (z. B. ein Förderband) ein ähnliches Reflexionsvermögen haben oder wenn das Reflexionsvermögen des Hintergrunds variabel ist und die Erkennung stören kann.
Vordergrundausblendung
Fotoelektrische Näherungssensoren mit Vordergrundausblendung (FGS) können Objekte in einer festgelegten Entfernung erkennen. Alle Objekte zwischen im Erfassungsbereich (auf den Hintergrund eingestellt) werden erkannt. Um eine zuverlässige Erfassung zu gewährleisten, muss der Hintergrund relativ hell sein und darf nicht in der Höhe variieren.
Wenn sich Objekte auf einer reflektierenden Oberfläche wie einem weißen oder hellen Förderband befinden, kann die Vordergrundausblendung die Erkennung verbessern. Anstatt das vom Objekt reflektierte Licht zu erfassen, erkennt der Sensor das Objekt anhand der Abwesenheit des vom Förderband reflektierten Lichts.
Retroreflektierende Sensoren
Bei einem retroreflektierenden Sensor trifft das ausgestrahlte Licht auf einen Reflektor und das reflektierte Licht wird vom Sensor ausgewertet. Durch die Verwendung von Polarisationsfiltern lassen sich Fehler minimieren. Dehnbare Folien und transparente Kunststoffverpackungen können diese Sensoren stören. Die Reduzierung der Empfindlichkeit der Sensoren kann helfen, diese Herausforderungen zu meistern. Darüber hinaus kann der Austausch von Standard-IR-Emittern mit Lasern größere Erfassungsbereiche und eine höhere Auflösung ermöglichen.
Die Performance retroreflektierender Sensoren kann durch eine geringere Hysterese beim Schalten als üblich verbessert werden. Bei diesen Designs können selbst eine minimale Abschwächung des Lichts zwischen Sensor und Reflektor, z. B. durch Glasflaschen, zuverlässig erkannt werden. SICK bietet auch ein AutoAdapt genanntes Überwachungssystem an, das die Schaltschwelle als Reaktion auf die allmähliche Verschmutzung, die zu einem Ausfall des Erfassungssystems führen könnte, kontinuierlich reguliert und anpasst.
Einweg-Lichtsensoren
Im Gegensatz zu retroreflektierenden Sensoren werden bei Einwegsensoren zwei aktive Komponenten verwendet: ein Sender und ein Empfänger. Die Einweg-Lichtsensorik ermöglicht größere Erfassungsbereiche. Der Austausch von IR-Emittern gegen Laserdioden kann die Erfassungsreichweite weiter erhöhen und gleichzeitig eine hohe Auflösung und präzise Erfassung gewährleisten.
Faseroptische Sensoren
Faseroptische Sensoren sind eine Variante der Einweg-Lichtsensoren. Bei einem faseroptischen fotoelektrischen Sensor sind Sender und Empfänger in einem einzigen Gehäuse untergebracht. Sender und Empfänger nutzen getrennte Glasfaserkabel. Diese Sensoren eignen sich besonders für den Einsatz in Anwendungen mit hohen Temperaturen und in gefährlichen und rauen Umgebungen.
Fotoelektrische Sensorarrays
Die fotoelektrischen Sensoren der Reflex-Array-Serie RAY26, wie das Modell 1221950, ermöglichen eine zuverlässige Objekterkennung von flachen Objekten sowie eine schnelle Inbetriebnahme. In Kombination mit einem Reflektor erkennen die fotoelektrischen Sensoren auch kleine, flache, transparente oder unebene Objekte bis zu einer Größe von 3 mm. Innerhalb eines 55 mm hohen Arrays mit gleichförmigem Licht erkennen die Sensoren die Vorderkante eines Objekts. So können auch perforierte Objekte ohne aufwändiges Schalten zuverlässig erkannt werden (Abbildung 4).
 Abbildung 2: Fotoelektrische Sensorarrays können Objekte mit einer Größe von minimal 3 mm in einem 55 mm hohen Feld erkennen. (Bildquelle: SICK)
Abbildung 2: Fotoelektrische Sensorarrays können Objekte mit einer Größe von minimal 3 mm in einem 55 mm hohen Feld erkennen. (Bildquelle: SICK)
Laser-Abstandssensoren
Für Anwendungen wie der Füllstandsüberwachung in Lagerbehältern, der Positionserkennung von Objekten auf Förderbändern, der Position auf der X- und Y-Achse in automatisierten Gabelstaplersystemen, der vertikalen Position von Kränen in Lagern und Deckenfördersystemen und der Durchmesserüberwachung beim Wickeln von Spulen stehen die Laser-Abstandssensoren DT50 zu Verfügung. Diese Sensoren unterstützen Laufzeitmessungen (time of flight, ToF) über mehrere Meter unter Nutzung des reflektierten Laserlichts, das Störfestigkeit gegenüber Umgebungslicht sowie einen präzisen und zuverlässigen Betrieb gewährleistet.
Der DT50-2B215252 zum Beispiel bietet eine Reichweite von 200 bis 30.000 mm und einige besondere Merkmale wie:
- Robustes Gehäuse mit Schutzart IP65 und IP67
- Bis zu 3.000 Abstandsmessungen pro Sekunde
- Minimale Reaktionszeit von weniger als 0,83 s
- Kompaktes Gehäuse für Anwendungen von Industrierobotern bis hin zur Füllstandsmessung in Lagerbehältern
Hochauflösende Messungen mit Statistik
HDDM+ (High-Definition Distance Measurement plus) ist eine hochauflösende ToF-Messtechnologie, die in Laser-Abstandssensoren und lichtbasierten Sensoren zur Objekterkennung und Entfernungsmessung (light detection and ranging, LiDAR) eingesetzt werden kann. Im Gegensatz zu Technologien mit Einzelimpuls- oder Phasenkorrelationsmessung ist HDDM+ ein statistischer Messprozess.
Die Software des Sensors wertet die Echos mehrerer Laserimpulse statistisch aus, um Störquellen wie Glasscheiben, Nebel, Regen, Staub, Schnee, Blätter, Zäune und andere Objekte herauszufiltern und die Entfernung zum Zielobjekt zu berechnen. Die daraus resultierende Entfernungsmessung kann auch unter schwierigen Umgebungsbedingungen ein hohes Maß an Sicherheit bieten (Abbildung 5).
 Abbildung 3: Die HDDM+-Software von SICK nutzt einen statistischen Auswertungsprozess, um das „Rauschen“ von Elementen wie Glasscheiben, Nebel, Regen, Staub, Schnee, Laub und Zäunen zu eliminieren. (Bildquelle: SICK)
Abbildung 3: Die HDDM+-Software von SICK nutzt einen statistischen Auswertungsprozess, um das „Rauschen“ von Elementen wie Glasscheiben, Nebel, Regen, Staub, Schnee, Laub und Zäunen zu eliminieren. (Bildquelle: SICK)
Typische Anwendungen für die HDDM+-Technologie sind die Abstandsmessung zur Qualitätskontrolle in der Elektronikfertigung, die mehrdimensionale Objekterkennung und Positionsbestimmung mit LiDAR im Maschinen- und Anlagenbau und die Positionsbestimmung von Industriekränen oder Fahrzeugen.
Der Erfassungsbereich von HDDM+-Sensoren beträgt bis zu 1,5 km auf retroreflektierendem Band. Das Modell DT1000-S11101 beispielsweise bietet eine Reichweite von bis zu 460 m mit einer typischen Messgenauigkeit von ±15 mm für natürliche Objekte und einer einstellbaren Auflösung von 0,001 bis 100 mm.
Induktive Sensoren
Induktive Näherungssensoren wie die Serie IME von SICK können eisenhaltige und nicht eisenhaltige Metallobjekte erkennen. Diese Sensoren bestehen aus einem Resonanzschaltkreis mit Induktivität und Kondensator (LC), der ein schnell wechselndes elektromagnetisches Feld erzeugt. Das Feld wird gedämpft, wenn ein metallisches Objekt in den Erfassungsbereich gelangt. Die Dämpfung wird durch den Signalauswertungskreis und einen Verstärker, der das Ausgangssignal erzeugt, erfasst (Abbildung 4).
 Abbildung 4: Ein einfacher induktiver Näherungssensor besteht aus einem LC-Schaltkreis, der ein Wechselfeld erzeugt, einem Signalauswerter und einem Verstärker. (Bildquelle: SICK)
Abbildung 4: Ein einfacher induktiver Näherungssensor besteht aus einem LC-Schaltkreis, der ein Wechselfeld erzeugt, einem Signalauswerter und einem Verstärker. (Bildquelle: SICK)
Zwei wichtige Kenndaten für die Erfassungsreichweite verschiedener Sensortechnologien sind die Nennerfassungsreichweite (Sn) und die gesicherte Erfassungsreichweite (Sa). Sn berücksichtigt keine Fertigungstoleranzen oder äußeren Einflüsse wie die Betriebstemperatur. Sa berücksichtigt sowohl Fertigungstoleranzen als auch Abweichungen unter den Betriebsbedingungen. Sa beträgt typischerweise etwa 81 % des Werts von Sn. Beim induktiven Sensor des Modells IME08-02BPSZT0S beträgt Sn beispielsweise 2 mm und Sa 1,62 mm.
Kapazitive Sensoren
Wie induktive Sensoren nutzen auch kapazitive Näherungssensoren einen Oszillator. In diesem Fall wird ein offener Kondensator verwendet, bei dem die aktive Elektrode im Sensor ein elektrostatisches Feld relativ zu einer Masse erzeugt. Diese Sensoren können die Anwesenheit einer Vielzahl von Materialien, einschließlich metallischer und nicht-metallischer Objekte, erkennen.
Wenn ein Objekt das elektrostatische Feld eintritt, ändert sich die Amplitude der Schwingungen im Schwingkreis in Abhängigkeit von den dielektrischen Eigenschaften des Materials. Ein Signalauswerter erkennt die Änderung und ein Verstärker erzeugt das Ausgangssignal (Abbildung 5).
 Abbildung 5: Bei einem kapazitiven Näherungssensor erzeugt ein Schwingkreis ein elektrostatisches Feld, das seine Eigenschaften ändert, wenn das zu erfassende Objekt in das Feld eintritt. (Bildquelle: SICK)
Abbildung 5: Bei einem kapazitiven Näherungssensor erzeugt ein Schwingkreis ein elektrostatisches Feld, das seine Eigenschaften ändert, wenn das zu erfassende Objekt in das Feld eintritt. (Bildquelle: SICK)
Wie bei induktiven Näherungssensoren gibt es auch bei kapazitiven Sensoren mehrere Kenndaten für die Erfassungsreichweite, darunter Sn, Sa und ein Reduktionsfaktor. Das Modell CM12-08EBP-KC1 besitzt zum Beispiel eine Sn von 8 mm und eine nominale Sa von 5,76 mm.
Das zu erfassende Objekt muss mindestens so groß sein wie die Sensorfläche und die Erfassungsreichweite variiert mit dem Reduktionsfaktor des Materials. Die Reduktionsfaktoren hängen mit der Dielektrizitätskonstante des Materials zusammen und können zwischen 1 bei Metallen und Wasser, 0,4 bei Polyvinylchlorid (PVC), 0,6 bei Glas und 0,5 bei Keramik liegen.
Magnetische Sensoren
Magnetische Näherungssensoren reagieren auf die Anwesenheit eines Magneten. Die magnetischen Näherungssensoren von SICK nutzen zwei Technologien zur Erkennung:
- Großmagnetwiderstandssensoren (GMR) basieren auf Widerständen, die ihren Wert bei Vorhandensein eines magnetischen Feldes ändern. Eine Wheatstone-Brücke wird verwendet, um die Änderung des Widerstands zu erkennen und ein Ausgangssignal zu erzeugen. Die Zylindersensoren der Reihe MZT7, wie der für den Einsatz mit T-Schlitz-Zylindern konzipierte MZT7-03VPS-KP0, nutzen die GMR-Technologie zur Erkennung der Kolbenposition in pneumatischen Antrieben und ähnlichen Anwendungen.
- Bei der LC-Technologie kommt ein Resonanzschaltkreis zum Einsatz, der mit einer kleinen Amplitude in Resonanz schwingt. Nähert sich ein externes Magnetfeld, erhöht sich die Resonanzamplitude. Der Anstieg wird von einem Signalauswerter erfasst und ein Verstärker erzeugt das Ausgangssignal (Abbildung 6). Der MM08-60APO-ZUA besitzt eine Sn von 60 mm und eine Sa von 48,6 mm.
 Abbildung 6: Bei einem magnetischen Näherungssensor kann die Feldsonde GMR- oder LC-Technologie verwenden. (Bildquelle: SICK)
Abbildung 6: Bei einem magnetischen Näherungssensor kann die Feldsonde GMR- oder LC-Technologie verwenden. (Bildquelle: SICK)
Ultraschallsensoren
Für Objekte mit einem Abstand von zu 8 m kann auf Ultraschallsensoren wie die der Familie UM30 von SICK zurückgegriffen werden. Diese Sensoren verfügen über eine integrierte Temperaturkompensation zur Verbesserung der Messgenauigkeit und bieten eine farbunabhängige Objekterkennung, Immunität gegen Staub und einen Betrieb bei bis zu +70 °C. Sie messen Entfernungen auf der Grundlage der Laufzeit-Technologie, bei der die Entfernung gleich der Geschwindigkeit des Schalls multipliziert mit der Gesamtlaufzeit der Schallwellen (t2) ist, wobei die Summe durch 2 geteilt wird (Abbildung 6).
 Abbildung 7: Ultraschallsensoren können die Entfernung auf der Grundlage der Gesamtlaufzeit (t2) der Schallwellen messen. (Bildquelle: SICK)
Abbildung 7: Ultraschallsensoren können die Entfernung auf der Grundlage der Gesamtlaufzeit (t2) der Schallwellen messen. (Bildquelle: SICK)
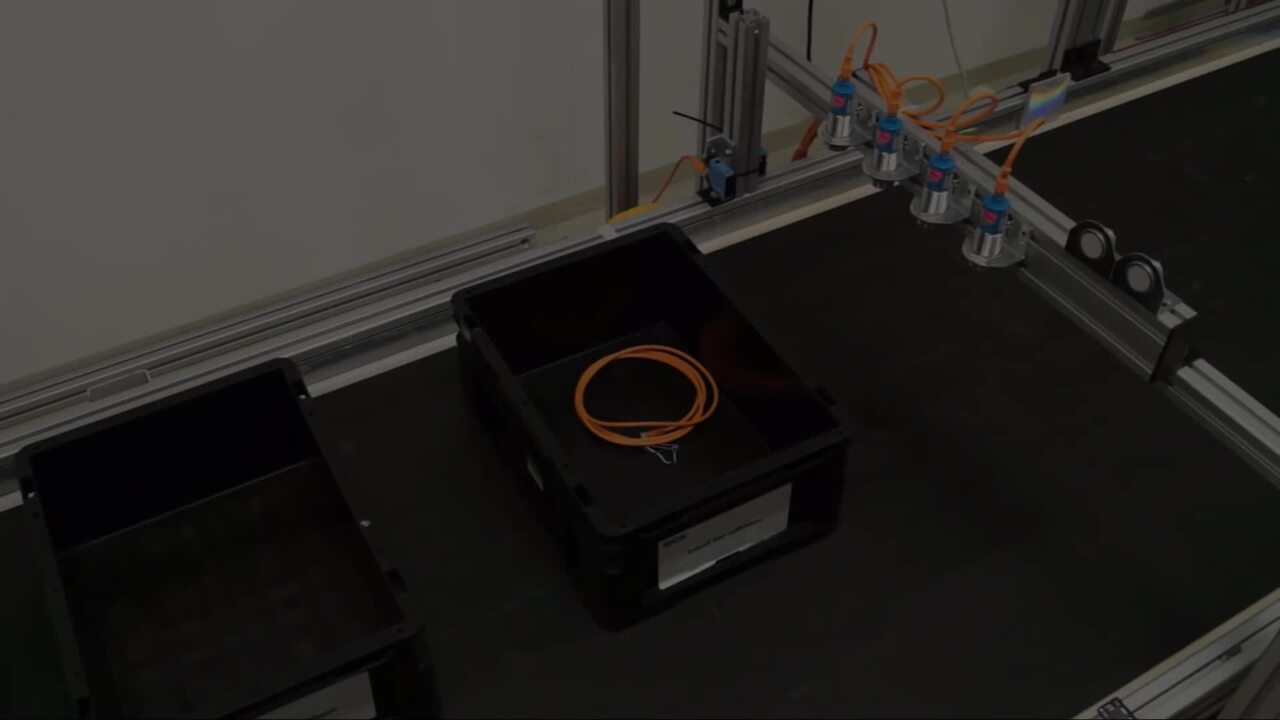
Ultraschallsensoren wie das Modell UM30-212111 eignen sich für Anwendungen wie die Leerbehälterüberwachung. Ein interner Temperaturwächter sorgt für eine Messgenauigkeit von ±1 %. Diese farbunabhängigen Sensoren können selbst bei Schmutz und Staub schwer zu unterscheidende Objekte erkennen.
Fazit
Die gute Nachricht ist, dass es eine breite Technologieauswahl für Näherungs- und Abstandssensorik gibt. Das bedeutet, dass für jede Anwendung eine Lösung existiert. Die Herausforderung besteht darin, die vielen Möglichkeiten zu prüfen und die optimale Lösung für die Erkennung bestimmter Materialien unter den tatsächlichen Anwendungs- und Betriebsbedingungen zu finden.
Haftungsausschluss: Die Meinungen, Überzeugungen und Standpunkte der verschiedenen Autoren und/oder Forumsteilnehmer dieser Website spiegeln nicht notwendigerweise die Meinungen, Überzeugungen und Standpunkte der DigiKey oder offiziellen Politik der DigiKey wider.