Ein industrielles Metaverse für kleine und mittelgroße Unternehmen zur schnellen Erforschung und Einführung von Roboterlösungen
Zur Verfügung gestellt von Nordamerikanische Fachredakteure von DigiKey
2024-11-21
Roboter und Cobots (kollaborative Roboter) gehören zu den hochmodernen Technologien in der Fabrikautomation. Digitale Zwillinge und virtuelle Realität (VR) gehören zu den führenden Design- und Entwicklungswerkzeugen. In Kombination können sie genutzt werden, um ein industrielles Metaversum zu schaffen, das selbst für kleine und mittlere Unternehmen (KMU) schnell zu höherer Produktivität führt.
KMUs können von einer einfachen und intuitiven Schnittstelle profitieren, die einen digitalen Zwilling, ein hochdetailliertes virtuelles Modell eines physischen Objekts wie eines Delta-, Linear- oder Mehrachsroboters und eine dreidimensionale (3D) VR-Umgebung kombiniert, um die direkte Ausführung und Überprüfung der Bewegungsabläufe des Roboters zu ermöglichen.
Die Nutzung dieser Funktionen unterstützt die Feinabstimmung und Optimierung des Automatisierungssystems auch ohne physische Hardware und ermöglicht die schnelle Erkundung verschiedener Lösungsmöglichkeiten.
Dieser Artikel befasst sich zunächst mit der Unterscheidung zwischen einem mathematischen, datenbeschriebenen digitalen Zwilling und einem visuellen digitalen Zwilling (VR-Zwilling) und damit, wie beide zur Schaffung des industriellen Metaversums benötigt werden. Anschließend werden ein Robotersteuerungssystem und die zugehörige Software von Igus vorgestellt, mit denen ein Roboter auf einer 3D-Oberfläche (visueller digitaler Zwilling) simuliert werden kann, ohne dass physische Hardware benötigt wird. Außerdem werden kompatible Delta-, Linear- und Mehrachsroboter vorgestellt, die zur Realisierung einer optimierten Lösung verwendet werden können.
Digitale Zwillinge und VR sind komplementäre Technologien mit unterschiedlichen Visualisierungsformen, Interaktionen und Hardware. Digitale Zwillinge sind datenbasierte Modelle von physischen Objekten, Systemen oder Prozessen. Sie sind so konzipiert, dass sie während des gesamten Lebenszyklus des zu modellierenden Objekts von der ersten Konzeption bis zur Stilllegung und zum Recycling verwendet werden können.
VR ist eine immersive, visuell basierte Technologie, die auch digitale Modelle verwendet. In einer VR-Umgebung ist es möglich, die Beziehungen und Interaktionen zwischen Objekten zu simulieren, etwa wenn ein Roboter eine Aufgabe ausführt. Während beide Technologien für Design und Simulation eingesetzt werden können, konzentriert sich die Technologie des digitalen Zwillings auf den gesamten Lebenszyklus, während sich VR auf die Interaktion zwischen physischen Objekten konzentriert.
Ein Metaversum kombiniert digitale Zwillinge und VR in einer virtuellen Umgebung, die Echtzeit-Interaktionen zwischen den digitalen Objekten und Menschen unterstützt. Es wird oft mit Computerspielen in Verbindung gebracht, findet aber zunehmend auch in der Wirtschaft und Industrie Anwendung.
Willkommen im iguverse
Igus hat das iguverse-Metaversum entwickelt, um technische Interaktionen in industriellen Umgebungen zu unterstützen, z. B. bei der Entwicklung und dem Einsatz von Robotersystemen. Das iguverse kann durch die Software Igus Robot Control (iRC) implementiert werden. Mit dieser kostenlosen und lizenzfreien Anwendung können Benutzer verschiedene Arten von Robotern steuern, darunter Deltaroboter, Cobots (Roboterarme) und Portalroboter.
Es bietet dem Benutzer eine 3D-Oberfläche und über 100 Beispielprogramme. Zu den Systemanforderungen für die Implementierung von iRC gehören ein PC (mindestens Intel i5 CPU) mit Windows 10 oder 11 (64 Bit) mit 500 MB freiem Festplattenspeicher und Ethernet- oder drahtloser Netzwerkverbindung.
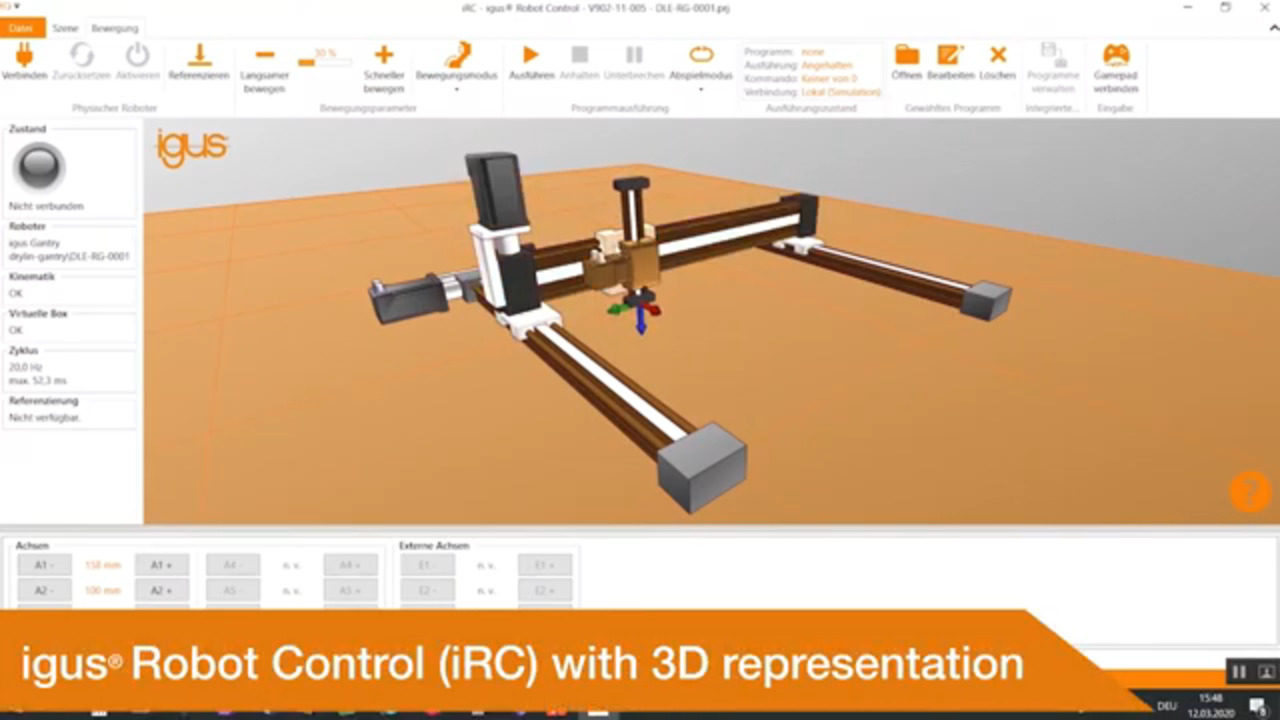
Das Herzstück der Software ist ein digitaler 3D-Zwilling des Roboters, der gerade programmiert wird. Ein Beispiel hierfür ist ein dreiachsiger Linearportalroboter wie das Modell DLE-RG-0001-AC-500-500-100 mit einem Arbeitsbereich von 500 x 500 x 100 mm oder ein zweiachsiger xy-Aktor wie das Modell DLE-LG-0012-AC-800-500 mit einem Arbeitsbereich von 800 x 500 mm (Abbildung 1). Bewegungen können mit wenigen Mausklicks definiert werden und anhand des 3D-Modells kann sichergestellt werden, dass die gewünschten Bewegungen machbar sind, noch bevor der Roboter gekauft wird.
 Abbildung 1: Beispiel für einen digitalen 3D-VR-Zwilling eines dreiachsigen Portalroboters im iguverse. (Bildquelle: Igus)
Abbildung 1: Beispiel für einen digitalen 3D-VR-Zwilling eines dreiachsigen Portalroboters im iguverse. (Bildquelle: Igus)
Neben der iRC-Software ist die Robotersteuerung ein Schlüsselelement der iguverse-Entwicklungsumgebung. Das Modell IRC-LG12-02000 zum Beispiel ist für 48V-Motoren ausgelegt, hat sieben Eingänge und sieben Ausgänge und verfügt über ein 10 m langes Kabel zum Anschluss an den Roboter. Die IRC-Controller enthalten Motorantriebsmodule für verschiedene Größen von bipolaren Schrittmotoren und sind konfigurierbar oder vorkonfiguriert erhältlich. Außerdem verfügt es über mehrere Schnittstellen für die Systemintegration, darunter:
- SPS-Schnittstelle (SPS: Speicherprogrammierbare Steuerung) zur Steuerung über die digitalen Ein- und Ausgänge, insbesondere zum einfachen Starten und Stoppen von Programmen über eine SPS oder einen Taster
- Modbus-TCP-Schnittstelle zur Steuerung über eine SPS oder einen PC
- CRI-Ethernet-Schnittstelle (CRI: Common Robotic Interface) zur Steuerung und Konfiguration über eine SPS oder einen PC
- ROS-Schnittstelle (ROS: Robot Operating System) zur Bedienung des Roboters per ROS
- Schnittstelle für Objekterkennungskameras
- Cloud-Schnittstelle zur Fernüberwachung des Roboterzustands
Unterstützte Kinematik
Eine Vielzahl von Kinematiken (Grundbewegungen), die die kontrollierte Bewegung des Roboters definieren, werden im iguverse unterstützt. Zusätzlich zu den vorkonfigurierten Kinematiken können im IRC bis zu drei weitere kinematisch unabhängige Achsen konfiguriert werden. Zu den vorkonfigurierten Kinematiken gehören:
- 2-Achsen- und 3-Achsen-Deltaroboter
- Portalroboter,
- 2-Achsen (X- und Y-Achse)
- 2-Achsen (Y- und Z-Achse)
- 3-Achsen (X-, Y- und Z-Achse)
- Roboterarme (Cobots),
- 3-Achsen (Achse 1, 2, 3)
- 3-Achsen (Achse 2, 3, 4)
- 4-Achsen (Achse 1, 2, 3, 4)
- 4-Achsen (Achse 2, 3, 4, 5)
- 5-Achsen (Achse 1 bis 5)
- 6-Achsen (Achse 1 bis 6)
- 4-Achsen-SCARA-Roboter
Einfache Programmierung für kostengünstige Automatisierung
Igus-Roboter und die Software IRC sind für eine kostengünstige Automatisierung konzipiert. Das wäre ohne eine benutzerfreundliche Programmierschnittstelle nicht möglich. Mit einer 3-Tasten-Maus oder einem Gamepad kann ein Roboter im iguverse bewegt und positioniert werden. Mit der IRC-Software kann ein Benutzer alle Achsen des digitalen Zwillings in der 3D-Oberfläche frei bewegen. Eine Teach-in-Funktion unterstützt die Entwicklung von Robotersteuerungssoftware, auch ohne dass ein physischer Roboter angeschlossen ist.
Um das Teach-in zu implementieren, bewegt der Benutzer den virtuellen Roboter manuell in die gewünschte Position und definiert, wie er sich dort bewegt. Der Vorgang wird so lange wiederholt, bis das komplette Bewegungsprofil erstellt ist. Der Werkzeugbereich in der IRC-Software ermöglicht es, passende Endeffektoren, wie z. B. Greifer, einfach hinzuzufügen und passt den Werkzeugmittelpunkt am Roboter automatisch an. Darüber hinaus kann eine Anbindung an ein übergeordnetes industrielles Leitsystem realisiert werden.
Der Prozess beginnt mit der Aktivierung des Roboters über die Schaltflächen „Connect“, „Reset“ und „Enable“ auf der Benutzeroberfläche. Die Status-LED der IRC sollte grün leuchten und den Status „No Error“ anzeigen. Das Bewegungsprofil kann nun über die Registerkarte "Jogging" eingegeben werden (Abbildung 2).
 in the iguverse immersive development environment (click to enlarge)") Abbildung 2: Die Registerkarte „Jogging“ (unten links) in der immersiven Entwicklungsumgebung von iguverse kann zur Eingabe von Bewegungsprofilen verwendet werden. (Bildquelle: Igus)
Abbildung 2: Die Registerkarte „Jogging“ (unten links) in der immersiven Entwicklungsumgebung von iguverse kann zur Eingabe von Bewegungsprofilen verwendet werden. (Bildquelle: Igus)
Portalroboter
Portalroboter, wie sie in den vorangegangenen Beispielen des iguverse enthalten sind, bestehen aus zwei Basis-X-Achsen, einer Y-Achse und einer optionalen Z-Achse. Die Y-Achse ist mit den beiden parallelen X-Achsen verbunden und bewegt sich im zweidimensionalen Raum hin und her. Die optionale Z-Achse unterstützt eine dritte Dimension der Bewegung.
Portalroboter von Igus haben selbstschmierende Kunststoffauskleidungen, die sanfter und leiser gleiten und rollen als herkömmliche kugelgelagerte Konstruktionen. Die neue Konstruktion ist leichter, korrosionsbeständig und wartungsfrei - wichtige Eigenschaften für KMUs. Ebenfalls von entscheidender Bedeutung für KMUs: Diese Roboter kosten bis zu 40 % weniger als herkömmliche Portalroboter und bieten eine schnellere Kapitalrendite (ROI).
Diese Roboter eignen sich für zwei Klassen von Anwendungen: niedrige Geschwindigkeiten mit schweren Lasten oder hohe Geschwindigkeiten mit leichten Lasten. Zu den repräsentativen Anwendungen gehören Verpackungs-, Bestückungs-, Etikettierungs-, Materialhandhabungs- und Montagevorgänge.
Sie werden in einer Reihe von Größen angeboten. Als Zubehör sind unter anderem Kupplungen, Endeffektoren und Motorflansche erhältlich. Beispiele für mittelgroße Portalroboter sind:
- DLE-FG-0006-AC-650-650: Dies ist ein zweidimensionaler flacher Portalroboter mit einer Arbeitsfläche von 650 x 650 mm. Dieser Roboter kann Nutzlasten von bis zu 8 kg handhaben und hat eine dynamische Rate von bis zu 20 Picks pro Minute.
- DLE-RG-0012-AC-800-800-500: Dies ist ein dreidimensionaler Portalroboter mit einer Arbeitsfläche von 800 x 500 mm. Dieser Roboter kann Nutzlasten von bis zu 10 kg handhaben und hat eine dynamische Rate von bis zu 20 Picks pro Minute.
Palettierfähigkeiten
Das Palettieren von Produkten für den Versand ist eine alltägliche Tätigkeit in der Produktion und Logistik. Das neueste und größte Mitglied im iguverse ist der XXL-Großportalroboter mit einem Arbeitsraum von 2000 x 2000 x 1500 mm, der sich für Palettieranwendungen bis zu 10 kg eignet. Sonderanfertigungen mit Arbeitsräumen von bis zu 6000 x 6000 x 1500 mm sind verfügbar.
Diese Portalroboter können Teile mit einem Gewicht von bis zu 10 kg aufnehmen, sie mit einer Geschwindigkeit von bis zu 500 mm/s transportieren und sie mit einer Wiederholgenauigkeit von 0,8 mm auf einer Palette ablegen (Abbildung 3). Die Palettierroboterlösung von Igus kostet bis zu 60 % weniger als vergleichbare Systeme.
 Abbildung 3: Die Palettierung ist eine gängige und wichtige Tätigkeit in der Fertigung und Logistik und kann mit einem Portalroboter automatisiert werden. (Bildquelle: Igus)
Abbildung 3: Die Palettierung ist eine gängige und wichtige Tätigkeit in der Fertigung und Logistik und kann mit einem Portalroboter automatisiert werden. (Bildquelle: Igus)
Deltaroboter
Wie Portalroboter sind auch Deltaroboter mit zwei oder drei Achsen erhältlich. Deltaroboter haben einen kuppelförmigen Arbeitsraum, der über dem Arbeitsbereich angebracht ist. Sie weisen außergewöhnlich hohe Geschwindigkeiten auf und werden häufig für die Materialhandhabung und die Bestückung eingesetzt. Beispiele für Deltaroboter von Igus sind:
- RBTX-IGUS-0047: Dies ist eine dreiachsige Konstruktion mit einem Arbeitsraumdurchmesser von 660 mm. Er bietet eine Genauigkeit von ±0,5 mm, eine maximale Nutzlast von 5 kg, eine Höchstgeschwindigkeit von 0,7 m/s und kann bis zu 30 Picks pro Minute durchführen. (Abbildung 4).
- RBTX-IGUS-0059: Dies ist eine 2-Achsen-Konstruktion mit einem Arbeitsraumdurchmesser von 700 mm. Sie bietet ebenfalls eine Genauigkeit von ±0,5 mm. Ihre maximale Nutzlast beträgt 5 kg, ihre Höchstgeschwindigkeit 2 m/s und sie kann bis zu 50 Picks pro Minute durchführen.
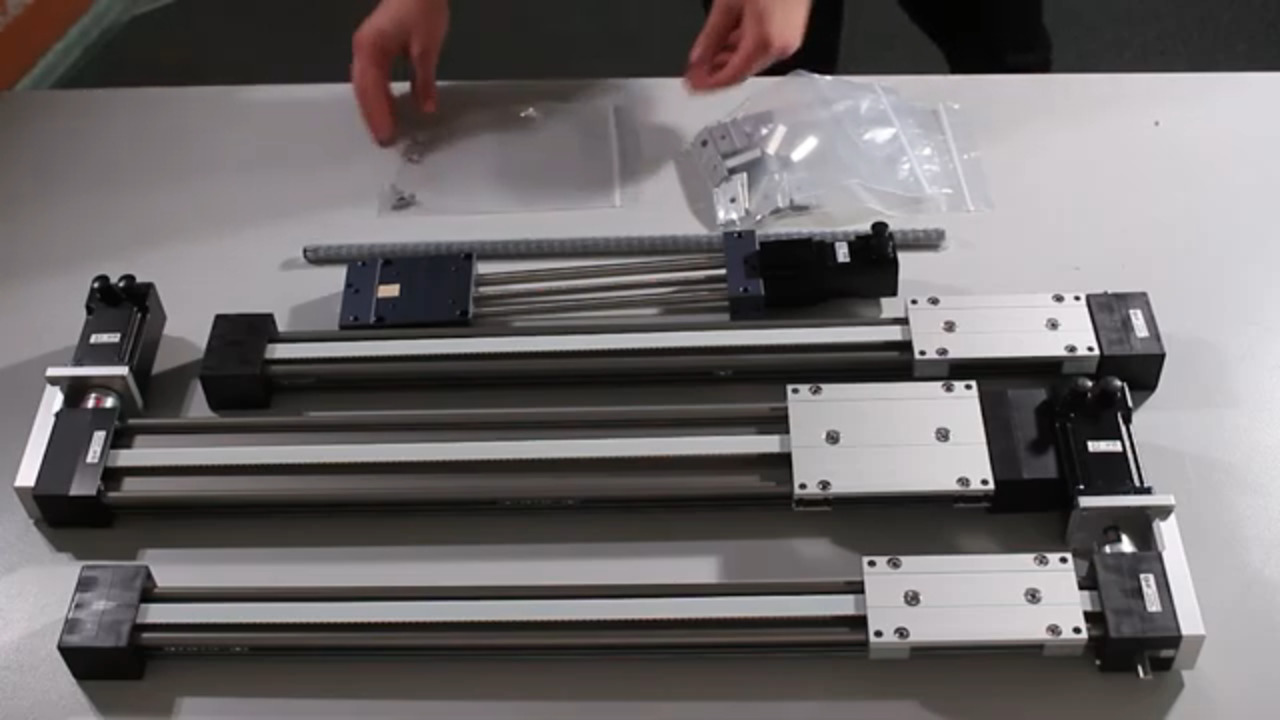
 Abbildung 4: Beispiel eines dreiachsigen Deltaroboters neben einem Igus-iRC (links). (Bildquelle: DigiKey)
Abbildung 4: Beispiel eines dreiachsigen Deltaroboters neben einem Igus-iRC (links). (Bildquelle: DigiKey)
Gelenkarm-Roboter
Das iguverse unterstützt auch Cobots mit Gelenkarmen. Cobots können zwei bis 10 oder mehr Achsen haben, auch Freiheitsgrade (DOF) genannt. Sie haben in der Regel einen großen Arbeitsbereich und können komplexe Aufgaben in Zusammenarbeit mit einer Person erledigen. Das Igus-Modell REBEL-6DOF-02 hat 6 Freiheitsgrade und das Modell REBEL-4DOF-02 hat 4 Freiheitsgrade. Beide bieten eine Genauigkeit von ±1 mm, einen nominalen Arbeitsbereich von 400 mm und können mindestens 7 Picks pro Minute mit einer linearen Geschwindigkeit von 200 mm/s durchführen.
Das 6DOF-Modell hat eine maximale Nutzlast von 2 kg und eine maximale Reichweite von 664 mm. Das 4DOF-Modell hat eine maximale Nutzlast von 3 kg und eine maximale Reichweite von 495 mm (Abbildung 5).
 and 6 DOF (right)") Abbildung 5: Gelenkarm-Cobots mit 4 Freiheitsgraden (links) und 6 Freiheitsgraden (rechts). (Bildquelle: Igus)
Abbildung 5: Gelenkarm-Cobots mit 4 Freiheitsgraden (links) und 6 Freiheitsgraden (rechts). (Bildquelle: Igus)
Zusammenfassung
Das immersive industrielle Metaversum von iguverse kombiniert digitale Zwillinge und VR, um Werkzeuge bereitzustellen, die eine schnelle Entwicklung und Bereitstellung von Roboterlösungen ermöglichen. Es ist kostenlos, lizenzfrei und für die lokale Ausführung auf einem PC ohne Cloud-Verbindung konzipiert. Es kann zur Entwicklung und zum Testen von Roboterlösungen verwendet werden, ohne dass ein Roboter anwesend ist.
Es unterstützt eine breite Palette von Kinematiken für Deltaroboter, Portalroboter, Roboterarme (Cobots) und SCARA-Roboter. Das IRC verfügt über eine Reihe von Schnittstellen zur Unterstützung von Automatisierungs- und Betriebsanforderungen, darunter eine SPS-Schnittstelle, Modbus TCP/IP, CRI Ethernet, eine ROS-Schnittstelle, eine Schnittstelle für Objekterkennungskameras und eine Cloud-Schnittstelle. Das iguverse, der iRC und zugehörige Roboter von Igus wurden optimiert, um den kostengünstigen Automatisierungsbedarf von kleinen und mittelgroßen Unternehmen zu unterstützen.
Haftungsausschluss: Die Meinungen, Überzeugungen und Standpunkte der verschiedenen Autoren und/oder Forumsteilnehmer dieser Website spiegeln nicht notwendigerweise die Meinungen, Überzeugungen und Standpunkte der DigiKey oder offiziellen Politik der DigiKey wider.